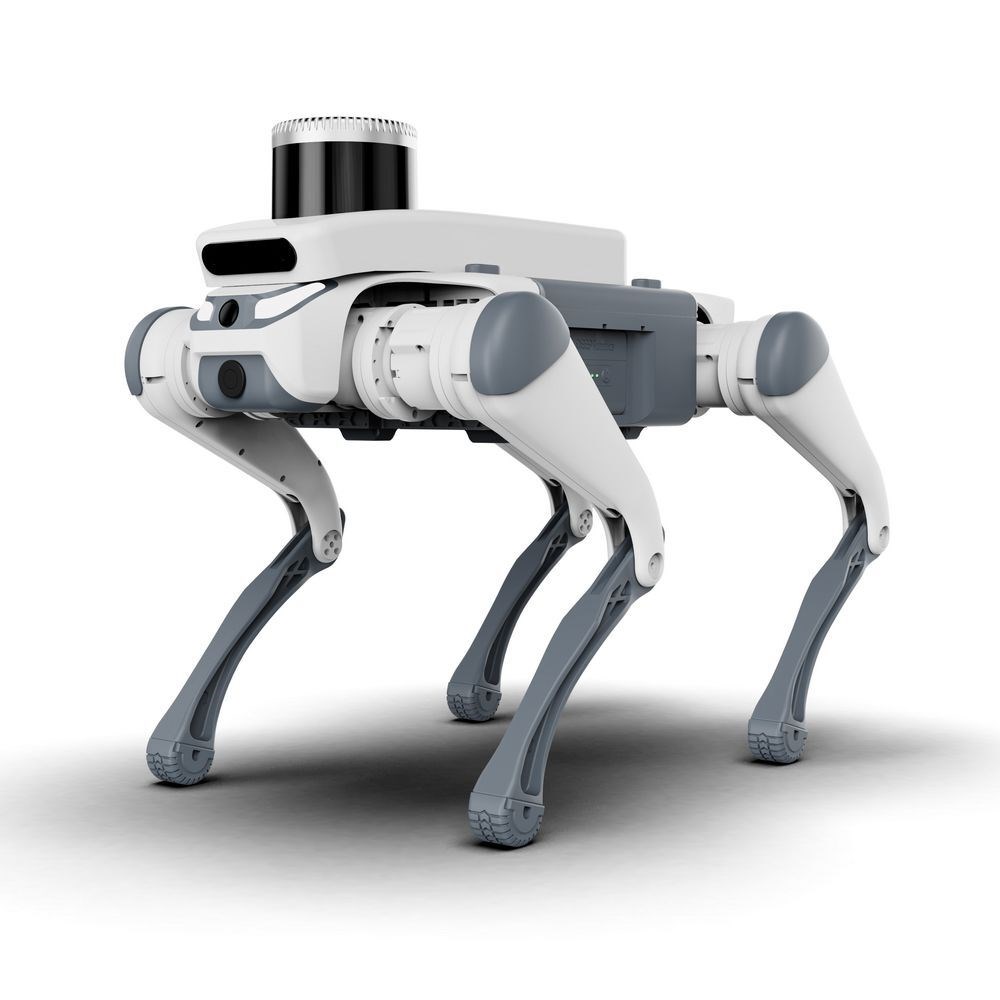
Бионический четырехопорный робот DeepRobotics Lite3 Lidar ✅

Информация о товаре носит справочный характер и не является техническим заданием и публичной офертой, определяемой статьей 437 ГК РФ.
Простор для персонализации
Платформа адаптирована к созданию пользовательских функций и подходит для профессиональной разработки ПО, включая работу с библиотеками SDK. Возможность оптимизации алгоритмов движения с помощью машинного обучения.
Превосходная вычислительная мощь
Lite3 Lidar оснащен мощным процессором для обработки машинного зрения NVIDIA Jetson Xavier NX, способного обрабатывать триллионы операций в секунду. Оптимальное решение для работы с ИИ.
Сверхподвижная бионика
Lite 3 Lidar отличает высокая движущая сила и увеличенный крутящий момент бионических опор. Робот забирается на склоны с углом 40° и высотой ступеней 15 см, автоматически поднимается при падении и перевороте. Есть несколько режимов ходьбы и прыжков.
Передовая навигация
16-лучевой лидар обеспечивает точную навигацию и автономность платформы. Lite3 Lidar работает в автономном режиме и быстро определяет свое местоположение в пространстве с помощью камеры глубины D435i.
Готов к модификациям
Продуманный модульный корпус позволяет без проблем оснащать робота дополнительным навесным оборудованием, значительно расширяя сферы применения платформы ― разведка, формирование карт местности, удаленное взаимодействие с объектами и пр.
Технические характеристики
| Основные характеристики | |
| Тип | Четырехопорный робот |
| Назначение | Программно-аппаратный комплект для профразработки и дополнения пользовательскими функциями, интерфейсами и сценариями при помощи программирования |
| Процессоры | Процессор движения RK3588, процессор восприятия - NVIDIA Jeston Xavier NX |
| Тип движителя | Опоры |
| Количество движителей | 4 |
| Количество двигателей | 4 |
| Варианты передвижения | Ходьба, «рысь», подъем после падения, переворот, прыжки, динамическое преодоление препятствий |
| Максимальная скорость | 2.2 м/сек |
| Преодоление препятствий, см | 15 |
| Макс.наклон поверхности, град. | 40 |
| Сканирование окружения | |
| Ультразвуковые сенсоры | 2 (фронтальный и тыловой) |
| Взаимодействие с окружением | |
| Динамики | Да |
| Проводные интерфейсы | Ethernet, USB3.0, HDMI |
| Управление | Ручное (контроллер в комплекте) и автономная работа |
| Прочие характеристики | |
| Установленное оборудование | 16-линейный LIDAR. Фронтальная широкоугольная камера для управления. Камера глубины D435i |
| Допустимая нагрузка, кг | 5 |
| Требование к нагрузке | Макс.нагрузка - 12.5кг |
| Электропитание | 28.8VDC |
| Емкость аккумулятора | 4400mAh |
| Время зарядки, мин | 48 |
| Время работы на одном заряде, мин | 120 |
| Требования к окружающей среде, температура | -10...+40C |
| Цвет | Серый |
| Особенности | От 1.5 до 2 часов работы или расстояние 2.7км |
| Вид поставки | RTL |
| Ширина, мм | 610 |
| Высота, мм | 503 |
| Глубина, мм | 370 |
| Вес, кг | 13.7 |
| Комплект поставки | Робот четырехопорный, транспортировочный кейс, зарядная подставка, адаптер питания с кабелем, контроллер, документация |
-
Вид оборудования/Тип товараРобот
-
ПроизводительDeepRobotics
-
Страна производстваКитай